BirdViewAR
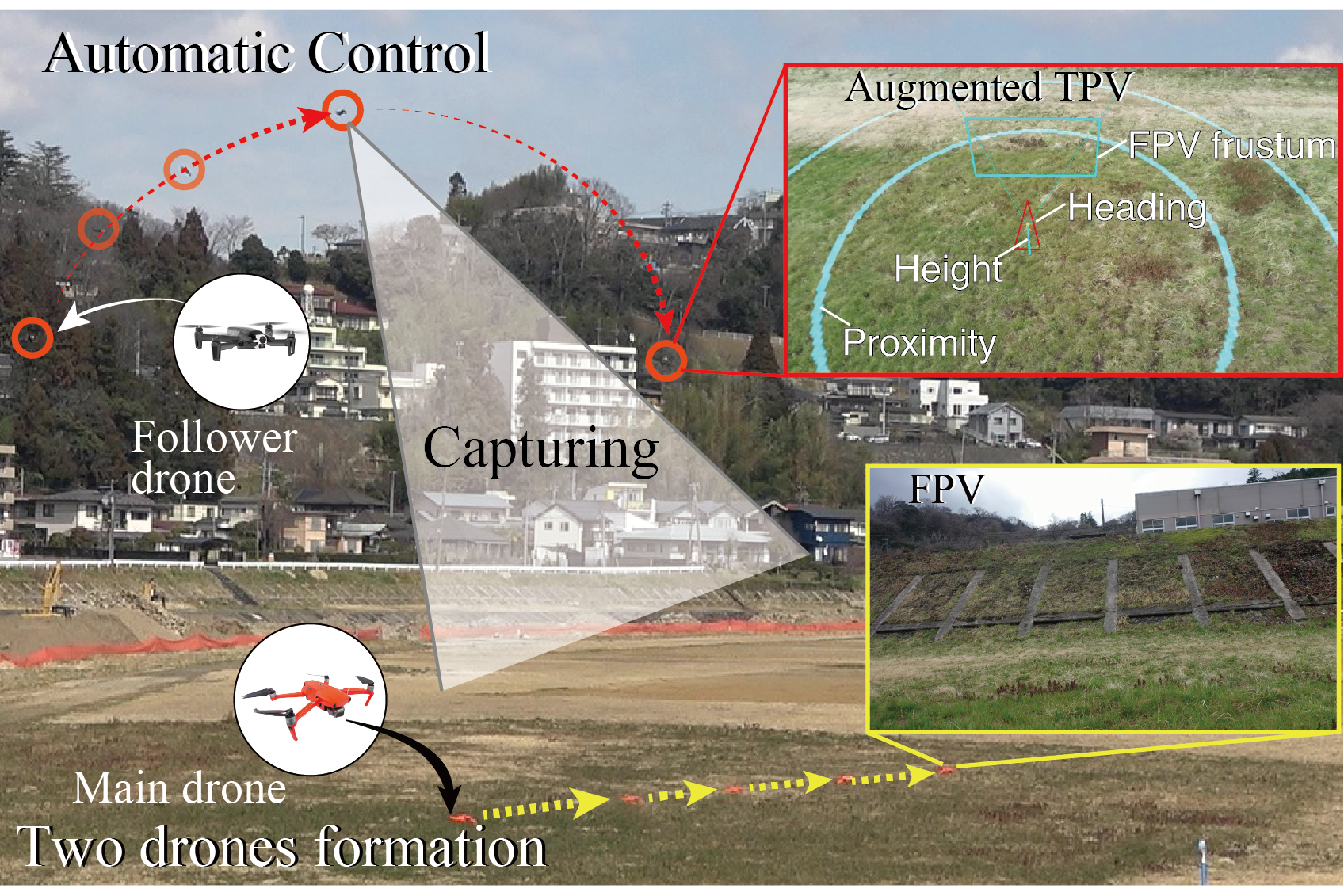
We propose BirdViewAR, a surroundings-aware remote drone-operation system that provides significant spatial awareness to pilots through an augmented third-person view (TPV) from an autopiloted secondary follower drone. The follower drone responds to the main drone’s motions and directions using our optimization-based autopilot, allowing the pilots to clearly observe the main drone and its imminent destination without extra input. To improve their understanding of the spatial relationships between the main drone and its surroundings, the TPV is visually augmented with AR-overlay graphics, where the main drone’s spatial statuses are highlighted: its heading, altitude, ground position, camera field-of-view (FOV), and proximity areas.
Publications
International
- Maakito Inoue, Kazuki Takashima, Kazuyuki Fujita, and Yoshifumi Kitamura. 2023. BirdViewAR: Surroundings-aware Remote Drone Piloting Using an Augmented Third-person Perspective. In Proceedings of the 2023 CHI Conference on Human Factors in Computing Systems (CHI ’23). Article 31, 1–19. https://doi.org/10.1145/3544548.3580681