Research Project
- 3D Motion Sensing and Interaction
- Augmenting Touch Interaction
- Block Interface
- Cross-Device Interaction
- Drone Control Interface
- Dynamic and Adaptive Spatial User Interface
- Enhancing User Comfort in the Metaverse
- Interaction in Virtual Reality
- Interactive Content Visualization
- Pointing, Scrolling, and Zooming Interface
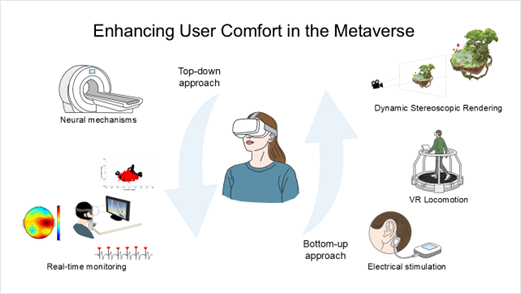
Enhancing User Comfort in the Metaverse
Recent studies indicate that 40% to 70% of Metaverse users experience physical discomfort, such as dizziness, eye strain, and nausea, during virtual experiences. This phenomenon is commonly known as "Cybersickness" or "VR Sickness." We are dedicated to researching reliable methods to measure these symptoms and developing effective strategies to mitigate them to create a comfortable virtual environment for everyone.











TetraForce: A Magnetic-Based Interface Enabling Pressure Force and Shear Force Input Applied to Front and Back of a Smartphone
We propose a novel phone-case-shaped interface named TetraForce, which enables four types of force input consisting of two force directions (i.e., pressure force and shear force) and two force-applied surfaces (i.e., touch surface and back surface) in a single device.



Emotion Embodied Avatars: Novel Remote Communication with Motion Unit AI
Nonverbal information plays an important role in human-rich communication. Among them, we are conducting research focusing on physical movements that are particularly important for enriching communication and are academically challenging. In particular, we built an AI that links human emotions and intentions with the "Motion Unit," which is an analysis unit for body movements, and we are conducting research to generate emotionally rich motions of avatars through a system of international arts-science and industry-academia collaboration.
-1-1-e1633680291794.png)
-3-e1633680343486.png)
-2-e1633681439974.png)
TiltChair
We propose an actuated office chair that physically manipulates the user’s posture by actively inclining the chair’s seat to address problems associated with prolonged sitting. The system controls the inclination angle and motion speed with the aim of achieving manipulative but unobtrusive posture guidance.
_fixed-7.png)

.png)

_fixed-9.png)
_fixed.png)
_fixed-12.png)
_fixed-11.png)

_fixed-2.png)
_fixed-8.png)

_fixed-3.png)
-1-e1633939290244.jpg)



_fixed-1.png)

-6-e1634104059970.png)
-scaled-e1634024643949.jpg)
-4-e1633939039527.png)
_fixed-4.png)
_fixed-6.png)




-1-e1634186880500.jpg)
-e1634187015820.jpg)

_fixed.png)