Third-Person Piloting
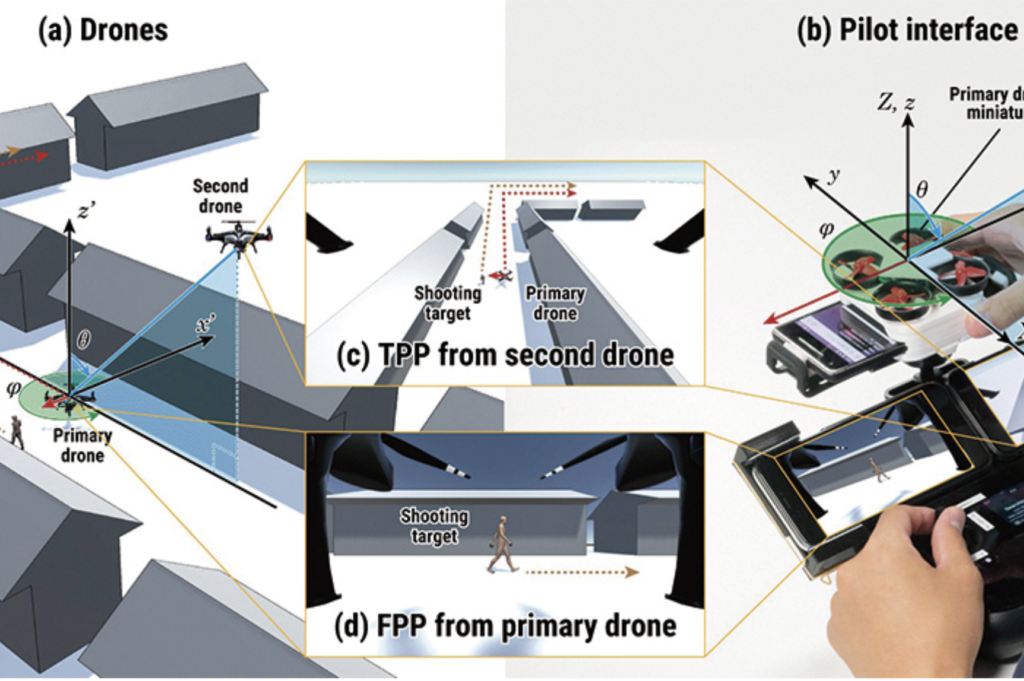
We propose Third-Person Piloting, a novel drone manipulation interface that increases situational awareness using an interactive third-person perspective from a second, spatially coupled drone. The pilot uses a controller with a manipulatable miniature drone. Our algorithm understands the relationship between the pilot’s eye position and the miniature drone and ensures that the same spatial relationship is maintained between the two real drones in the sky. This allows the pilot to obtain various third-person perspectives by changing the orientation of the miniature drone while maintaining standard primary drone control using the conventional controller.
Publications
International
- Ryotaro Temma, Kazuki Takashima, Kazuyuki Fujita, Koh Sueda and Yoshifumi Kitamura, 2019. Third-Person Piloting: Increasing Situational Awareness using a Spatially Coupled Second Drone. In Proceedings of ACM Symposium on User Interface Software and Technology. 507–519.
https://doi.org/10.1145/3332165. 3347953