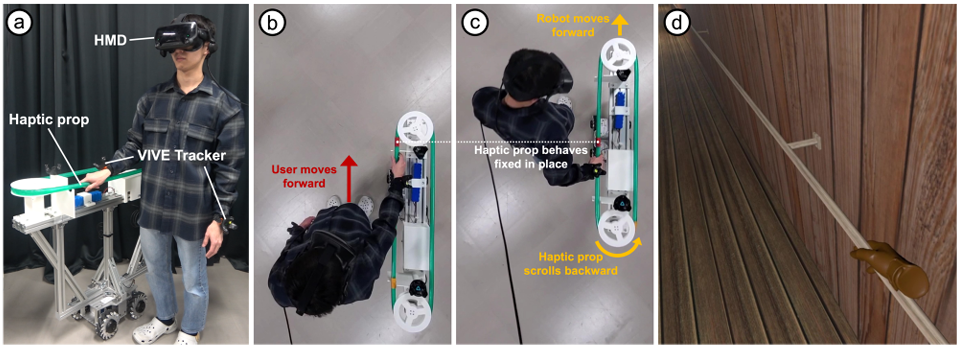
ルームスケール VR では,壁や手すりなど固定物の触覚フィードバックを連続的に提示することは,ユーザの歩行範囲の広さや必要とされる力の大きさの点で困難であった.本研究では,ユーザに追従する単一のロボットを用いて,歩行中に固定物の触覚フィードバックを連続的に提示する手法 LoopBot を提案する.この手法では,ロボットに搭載した環状の触覚プロップがスクロールしてロボットの移動を相殺す ることで,プロップの固定感を提示する.我々は,LoopBot のコンセプトを実証するため,手すりを握りながら歩く体験のプロトタイプを実装した.予備ユーザテスト(N = 10)では,スクロールしない場合に 比べて,体験の現実感と手すりの固定感が有意に高いことが確認された.
Publication
International
- Tetsushi Ikeda, Kazuyuki Fujita, Kumpei Ogawa, Kazuki Takashima, Yoshifumi Kitamura, LoopBot: Representing Continuous Haptics of Grounded Objects in Room-scale VR, Proceedings of the 37th Annual ACM Symposium on User Interface Software and Technology (UIST ’24), Article No. 135, pp. 1-10, October 2024, 10.1145/3654777.3676389