UbiSurface
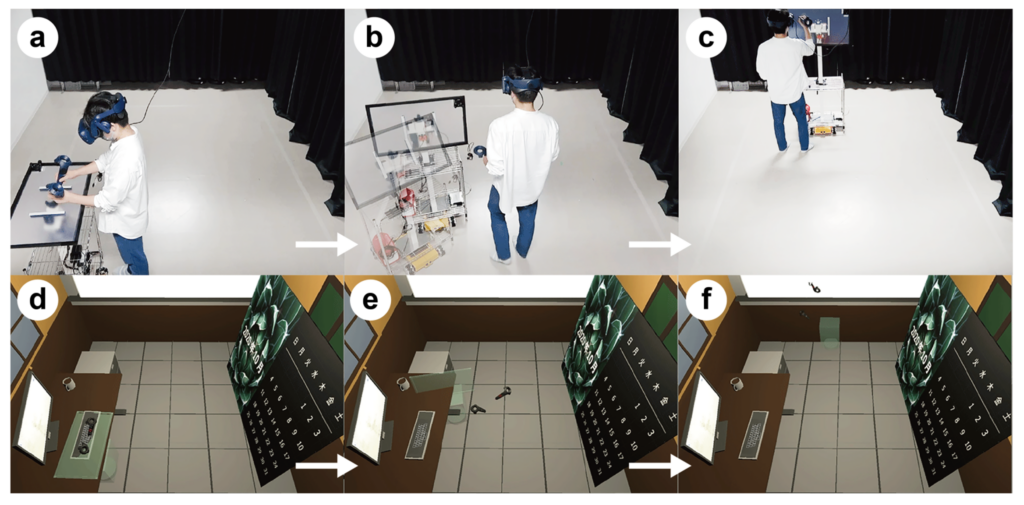
バーチャルオフィスでの作業では,タイピングや手書きといった平面での入力方法を必要とすることがよくある.しかし、現在一般に普及しているVR HMDのセットアップでは,腕の疲労を引き起こし,入力精度を低下させる可能性のある空中インタラクションに依存している.この問題に対処するため,我々は,バーチャルな入力平面(VRホワイトボードやVRキャンバスなど)を物理的にユーザに提示するために,自動的に位置を変え,ユーザが部屋を歩き回りながら正確で疲労の少ない入力を達成できるようにするロボットタッチサーフェスである,UbiSurfaceを提案する.キャンバスサイズのタッチサーフェスの位置,高さ,ピッチとヨーの角度を動的に変化させることができるUbiSurfaceのプロトタイプを設計し,実装した.実験から,このシステムが腕の疲労を軽減し,特に描画タスクにおいて入力精度を向上させることが示された.
Publication
International
- Ryota Gomi, Kazuki Takashima, Yuki Onishi, Kazuyuki Fujita, Yoshifumi Kitamura, UbiSurface: A Robotic Touch Surface for Supporting Mid-air Planar Interactions in Room-Scale VR, Proceedings of the ACM on Human-Computer Interaction, Volume 7, Issue ISS, Article 443, pp.376-397, November 2023, https://doi.org/10.1145/3626479